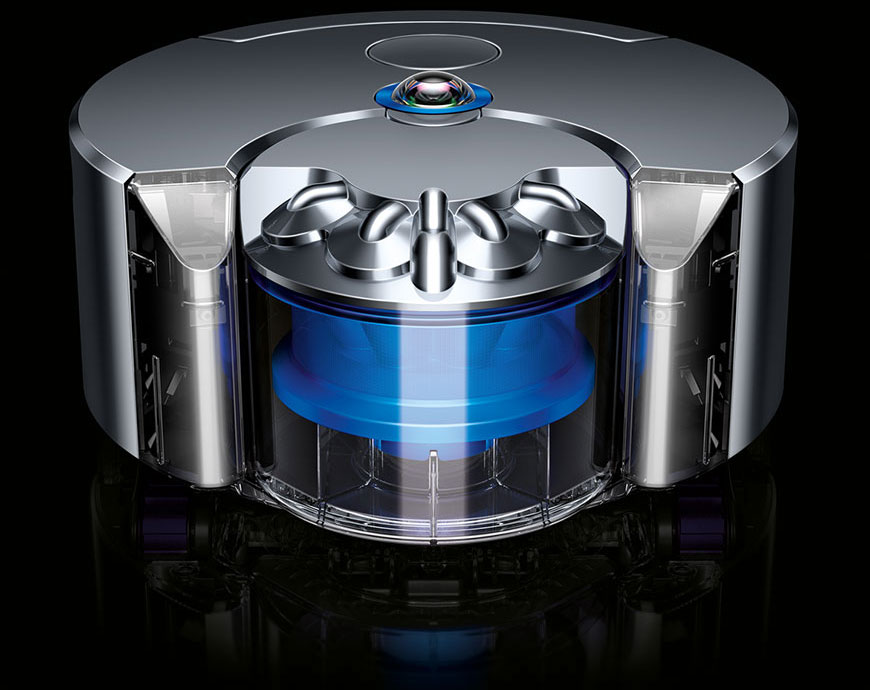
Le Dyson 360 Eye™ robot est le nouveau robot aspirateur de chez Dyson. Vous me direz qu’il s’agit d’un n-ieme robot aspirateur mais celui-ci met en oeuvre un capteur optique permettant de trianguler sa position. Réelle différence par rapport aux autres robots qui se promènent en spirale ou en balayage.
