Un capteur tactile visuel, quelle drôle d’idée! En fait pas tant que cela. Nous sommes capables à l’aide de notre réseau nerveux de l’épiderme d’identifier des éléments. Les chercheurs travaillent déjà depuis quelques années à doter les actionneurs de leurs robots de retours haptiques afin d’éviter par exemple de broyer des œufs en les attrapant. Ici la nouveauté est qu’au lieu de se baser sur un capteur de pression, le capteur utilise un retour visuel afin d’obtenir des informations sur l’objet à saisir. Ce qui lui permet par exemple de percevoir l’orientation ou le type de l’élément.
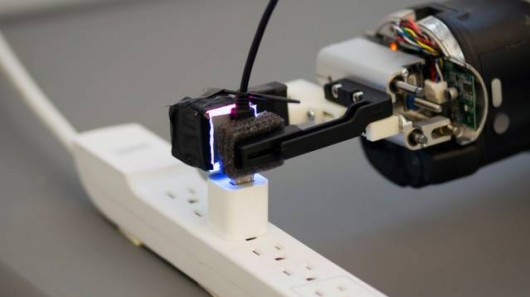
Lire l’article complet : GelSight sensor lets robots « see » through their hands.